Foxbat
Digital-Forum Gold Master
per esperti o anche no  magari è una cretinata
magari è una cretinata 
Indirizzato particolarmente a @Bobbys che a quanto ho capito di calcoli matematici se ne intende e a chi è in grado.
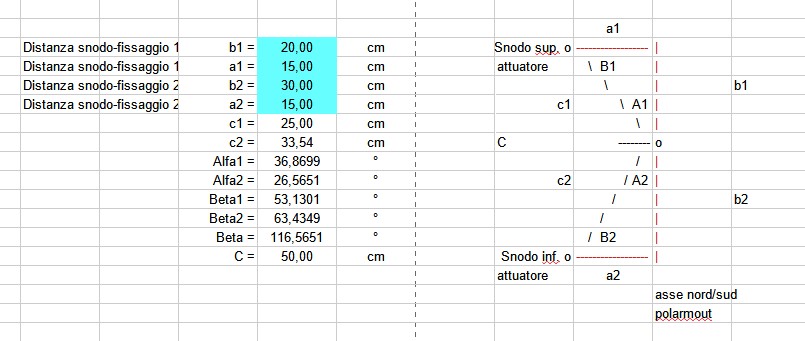
A differenza dei motorini HH DiSEqC che si posizionano automaticamente e con precisione sulla posizione satellitare in base alle coordinate impostate, i polarmount ad attuatore comandati da posizionatore non funzionano in questo modo, i satelliti prima bisogna andarli a cercare manualmente, (se si possiede un analiizzatore di spettro la cosa è più facile) poi una volta trovati se ne memorizzano le posizioni...
Nel corso degli anni ho cercato e memorizzato 72 posizioni, tra attive e non attive.
Quando usciva una nuova posizione satellitare ai tempi dell'analogico bastava impostare la frequenza e spostare la parabola quando comparivano le immagini il nuovo satellite e la nuova posizione era trovata, con il digitale la cosa non è cosi diretta, con calcoli"empirici" ci si porta in prossimità della posizione ed in qualche modo il satellite si trova lo stesso.
Ora grazie a Bobbys
 sto inseguendo il segnale della telemetria del vecchio Hotbird 13B che si sta spostando ad est per sapere dove è attualmente indipendentemente da quello che indicano i software di tracking... cercando di batterli sul tempo quando il satellite si sarà "fermato" e loro continueranno ad indicarne lo spostamento fin quando i dati non verranno aggiornati...
sto inseguendo il segnale della telemetria del vecchio Hotbird 13B che si sta spostando ad est per sapere dove è attualmente indipendentemente da quello che indicano i software di tracking... cercando di batterli sul tempo quando il satellite si sarà "fermato" e loro continueranno ad indicarne lo spostamento fin quando i dati non verranno aggiornati...
Risalgo alla sua posizione attuale confrontando la lettura degli impulsi e confrontandola con quella relativa agli altri satche ho in memoria facendo calcoli empirici e poi confronto la "mia posizione" con quella indicata dai software di tracking per vedere se corrispondono, oggi ad esmpio per me è leggermente "più in là" rispetto a quello che mi dice il software...
Il mio attuatore da 18" per coprire l'arco polare dai 75°E ai 45°W arriva ad un conteggio di impulsi di 626.
0001 impulsi = ABS2 a 75.0°E
0626 impulsi = intelsat 14 a 45.0°W
Ora il rapporto conteggio impulsi/gradi di spostamento su l'arco polare non è lineare, nel senso che più ci si sposta a ovest minore diventa il numero di impusi rispetto allo spostamento in gradi eseguito.
Esempio:
Per muoversi dai 75°E ai 72°.1 gradi E conteggia 16 impusi per 3.1 gradi di spostamento.
Per muoversi dai 24°.5 W ai 27°.5 gradi W conteggia 10 impulsi per 3.0 gradi di spostamento.
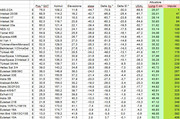
Ho una tabella con tutte le posizioni satellitari ed i relativi conteggi di impulsi.
La domanda è:
In base a questi dati è possibile calcolare approssimativamente ma con una certa precisione, quindi non "ad occhio" il numero di impulsi occorenti per raggiungere ipotetiche posizioni attualmente non occupate da nessun sat geostazionario (indipendentemente se verranno occupate un domani o no)
Faccio un esempio :
75°E ABS2 0001 impulsi
74°3 Nuovo sat XXXX impulsi
72°E Intelsat 22 0017 impulsi
Non mi serve il singolo calcolo relativo al "nuovo sat 74°3 " che empiricamente posso fare anche io ma una tabella posizione/impusi/grado tipo:
75°E 0001 impulsi
74°E XXXX impulsi
73°E XXXX impulsi
72°E XXXX impulsi
71°E XXXX impulsi e così via, ancora meglio se la differenza tra le posizioni è di 0.5° ancora meglio se la differenza è di 0,1 gradi
per non stare a fare ogni giorno calcoli empirici
Spero di essermi spiegato bene.
magari è una cretinata Indirizzato particolarmente a @Bobbys che a quanto ho capito di calcoli matematici se ne intende e a chi è in grado.
A differenza dei motorini HH DiSEqC che si posizionano automaticamente e con precisione sulla posizione satellitare in base alle coordinate impostate, i polarmount ad attuatore comandati da posizionatore non funzionano in questo modo, i satelliti prima bisogna andarli a cercare manualmente, (se si possiede un analiizzatore di spettro la cosa è più facile) poi una volta trovati se ne memorizzano le posizioni...
Nel corso degli anni ho cercato e memorizzato 72 posizioni, tra attive e non attive.
Quando usciva una nuova posizione satellitare ai tempi dell'analogico bastava impostare la frequenza e spostare la parabola quando comparivano le immagini il nuovo satellite e la nuova posizione era trovata, con il digitale la cosa non è cosi diretta, con calcoli"empirici" ci si porta in prossimità della posizione ed in qualche modo il satellite si trova lo stesso.
Ora grazie a Bobbys
sto inseguendo il segnale della telemetria del vecchio Hotbird 13B che si sta spostando ad est per sapere dove è attualmente indipendentemente da quello che indicano i software di tracking... cercando di batterli sul tempo quando il satellite si sarà "fermato" e loro continueranno ad indicarne lo spostamento fin quando i dati non verranno aggiornati...Risalgo alla sua posizione attuale confrontando la lettura degli impulsi e confrontandola con quella relativa agli altri satche ho in memoria facendo calcoli empirici e poi confronto la "mia posizione" con quella indicata dai software di tracking per vedere se corrispondono, oggi ad esmpio per me è leggermente "più in là" rispetto a quello che mi dice il software...
Il mio attuatore da 18" per coprire l'arco polare dai 75°E ai 45°W arriva ad un conteggio di impulsi di 626.
0001 impulsi = ABS2 a 75.0°E
0626 impulsi = intelsat 14 a 45.0°W
Ora il rapporto conteggio impulsi/gradi di spostamento su l'arco polare non è lineare, nel senso che più ci si sposta a ovest minore diventa il numero di impusi rispetto allo spostamento in gradi eseguito.
Esempio:
Per muoversi dai 75°E ai 72°.1 gradi E conteggia 16 impusi per 3.1 gradi di spostamento.
Per muoversi dai 24°.5 W ai 27°.5 gradi W conteggia 10 impulsi per 3.0 gradi di spostamento.
Ho una tabella con tutte le posizioni satellitari ed i relativi conteggi di impulsi.
La domanda è:
In base a questi dati è possibile calcolare approssimativamente ma con una certa precisione, quindi non "ad occhio" il numero di impulsi occorenti per raggiungere ipotetiche posizioni attualmente non occupate da nessun sat geostazionario (indipendentemente se verranno occupate un domani o no)
Faccio un esempio :
75°E ABS2 0001 impulsi
74°3 Nuovo sat XXXX impulsi
72°E Intelsat 22 0017 impulsi
Non mi serve il singolo calcolo relativo al "nuovo sat 74°3 " che empiricamente posso fare anche io ma una tabella posizione/impusi/grado tipo:
75°E 0001 impulsi
74°E XXXX impulsi
73°E XXXX impulsi
72°E XXXX impulsi
71°E XXXX impulsi e così via, ancora meglio se la differenza tra le posizioni è di 0.5° ancora meglio se la differenza è di 0,1 gradi
per non stare a fare ogni giorno calcoli empirici
Spero di essermi spiegato bene.
Ultima modifica:
 ci aggiunge i punti da misurare, servirebbe poi la procedura di calcolo...
ci aggiunge i punti da misurare, servirebbe poi la procedura di calcolo...